Diferenciál s omezenou svorností (také: diferenciál s omezenou svorností (LSD), diferenciál s omezenou svorností , samosvorný diferenciál, diferenciál s omezenou svorností ) je diferenciál , jehož mechanika díky konstrukčně inherentně zvýšenému vnitřnímu odporu mezi některými rotujícími částmi umožňuje např. diferenciál bez jakýchkoliv - nebo ovládacích akcí zvenčí pro nezávislé vyrovnávání úhlových rychlostí hnacího a hnaného článku až po jejich úplné vzájemné zablokování a přeměnu celého diferenciálu na přímý převod.
Je třeba mít na paměti, že v anglické literatuře se tyto diferenciály označují jako „LSD (Limited-Slip Differential)“, tedy „diferenciál s omezeným prokluzem“ (slip), přičemž tento termín nedefinuje fyzikální princip činnosti. zařízení, přítomnost tření, odporu, ale i přítomnost/nepřítomnost diferenciálního řízení atd. Důležitá je pouze funkce blokování nekontrolovaného rozdílu úhlových rychlostí pohonů („prokluz“). "Limited slip" obvykle implikuje určitou předem stanovenou hranici rozdílu úhlových rychlostí, nad kterou zámek začíná fungovat. V některých implementacích lze blokování použít preventivně, to znamená ještě předtím, než nápravové hřídele mají rozdíl v úhlových rychlostech.
Hlavní výhodu diferenciálu s omezeným vnitřním odporem (LDR) lze vidět na případu konvenčního (neboli „otevřeného“) diferenciálu, ve kterém jedno kolo nemá vůbec žádný kontakt s vozovkou. V tomto případě druhé kolo v kontaktu s vozovkou zůstane nehybné a první kolo, které není v kontaktu s vozovkou, se bude volně otáčet - přenášený točivý moment bude stejný na obě kola, ale nepřekročí prahovou hodnotu požadovaného momentu pro pohyb vozidla, a proto vozidlo zůstane stát. U běžných aut jezdících po asfaltových silnicích je tato situace nepravděpodobná, a proto se pro taková auta docela hodí konvenční diferenciál. Při jízdě v obtížnějších podmínkách, například při jízdě v blátě nebo v terénu, k těmto situacím dochází a přítomnost diferenciálu se zvýšeným vnitřním odporem vám umožní pohyb nezastavit. Omezením rozdílu úhlových rychlostí kol se přenáší užitečný moment tak dlouho, dokud má alespoň jedno z kol trakci.
Blokovací koeficient je nejdůležitější hodnotící vlastností každé RPA. V informačních materiálech o RPA může být tento koeficient vyjádřen dvěma způsoby a poněkud se liší ve smyslu výkladu, i když v obou případech znamená totéž, jen z různých úhlů pohledu.
V zahraniční odborné literatuře se KB obvykle vyjadřuje jako procentuální hodnota v desítkách procent v rozmezí 20 % a výše. Číslo udává šířku rozsahu relativního rozdělení točivého momentu mezi kola/nápravy, na které se vztahuje konkrétní RPA, od statického (opraveného o jeho možnou asymetrii) zabudovaného v diferenciálu až po maximální úroveň 100/0, v rámci které RPA dokáže zajistit vzájemné blokování. Tato definice spadá pod anglický termín Locking Effect (“blokující efekt”). V ruskojazyčné technické literatuře je KB vyjádřeno jako číslo od 2 a vyšší (obvykle bez desetinných zlomků), které udává maximální možný rozdíl točivých momentů (rozdíl v tažné síle) na kolech / nápravách, v rámci kterých může daná RPA zajistit jejich vzájemné blokování. Tato definice KB odpovídá anglickému termínu Torque Bias (“torque shift”).
Přestože oba koncepty CB implikují různé kalkulační vzorce, absolutně jakýkoli RPA může být správně odhadnut kterýmkoli z nich. Zároveň lze každou ze dvou hodnot KB korelovat s celkovým odhadovaným ukazatelem a mezi oběma hodnotami je vždy korespondence jedna ku jedné. Takže např. hodnota KB = 50 % a KB = 3 znamená v obou případech totéž: že RPA s uvedeným KB umožňuje přerozdělení točivého momentu mezi kola / nápravy v poměru nejvýše 75/ 25, což na jedné straně dává 50 % plného rozsahu možného přerozdělení efektivně využitého točivého momentu (75-25=50), a na druhé straně dává 3násobný rozdíl v možné tažné síle (75/25 =3). Číselná (nikoli procentuální) hodnota KB je zde možná intuitivnější, zejména proto, že z ní kromě svého hlavního významu vyplývá podobný rozdíl v přípustné adhezní síle kol / náprav k povrchu, který ve stejném případě KB = 3 znamená, že maximální efektivní využití výkonu motoru na tomto RPA je možné pouze tehdy, pokud se síla záběru každého kola s povrchem vozovky neliší více než třikrát.
Jednoduchý (volný) diferenciál neumožňuje získat žádný rozdíl v efektivně využitých točivých momentech na hnaných táhlech, zde je rozdíl mezi tažnou silou obou kol / náprav prakticky nulový v jakýchkoli režimech, KB takového diferenciálu je 0 % nebo 1. Přímá převodovka nebo zablokované diferenciály umožňují realizaci veškerého efektivně využitého točivého momentu na libovolném hnaném článku, zde jakékoli kolo/náprava může zajistit veškerou trakci při nulové úrovni trakce na druhém kole/nápravě a KB v tomto případě je 100% nebo nekonečno.
RPA může mít dvě horní hodnoty KB, jednu pro každou výkonovou větev. To je možné v případech asymetrického diferenciálu, kdy konstrukční kancelář obdrží korekci asymetrie - to znamená, že horní hodnoty konstrukční kanceláře pro každou ze stran se od sebe liší rozdílem v poměru. nasazených točivých momentů (např. u asymetrického zadního vačkového křížového kola DPVS nákladního automobilu GAZ-66, rozkládající točivý moment na kola v poměru ≈(60/40), hodnoty KB pro pravé a levá kola jsou 3.1 a 2.1). A to je možné u symetrických diferenciálů, když je to konstrukčně přípustné mechanikou chodu uzávěrky (například u symetrického šnekového převodu Torsen Type-1 RPAS lze realizovat různé hodnoty KB prostřednictvím různých úhlů řezu zubů každého páru satelit-kolo).
Obvykle je CB konkrétního RPA jeho maximální CB. Každá RPA má přitom hodnotu tzv. počátečního KB, která se většinou nedeklaruje.
Tímto pojmem se rozumí vytvoření v RPA vnitřního odporu vůči vzájemnému otáčení hnaných článků ve statice, to znamená při absenci jakéhokoli krouticího momentu působícího na diferenciál. Hodnota úrovně předpětí je určena silou potřebnou k posunutí (otočení) jakéhokoli diferenciálního hnaného článku, když je hnací článek v klidu. Ve volném diferenciálu je úroveň předpětí blízká nule. Předpětí, pokud existuje, „funguje“ vždy, bez ohledu na to, zda je RPAS zatížen tažným nebo brzdným momentem nebo ne. Přítomnost předpětí není nezbytným předpokladem pro provoz RPA.
Takzvaná „předpínací spojka“ znamená určité zařízení uvnitř RPA, které plní výše uvedené funkce a znesnadňuje vzájemné otáčení ozubených kol hnaných diferenciálem. Konstrukce tohoto zařízení nemá univerzální podobu a může být jakákoliv na různé RPA. Obvykle se jedná o distanční pružiny různých tvarů, doplněné distančními kroužky.
V osobních automobilech se běžně používají dva typy RPA:
Diferenciály obou typů umožňují určitý konstrukčně naprogramovaný rozdíl mezi momenty (v prvním případě) nebo úhlovými rychlostmi (v druhém případě), ale ukládají mechanické omezení vzniku velké disproporce.
Konstrukčně mohou být šroubové diferenciály vyrobeny na základě jakéhokoli plochého jednořadého nebo dvouřadého planetového mechanismu schémat SHS nebo SVE s rovnoběžnými osami satelitů, které zase mohou být jednoduché nebo párové. Budou existovat dva rysy společné pro jakýkoli typ výkonu: použití válcových spirálových ozubených kol ve všech párech záběru a absence skutečných satelitních os jako součástí. Spirálové ozubení jako takové zde není použito a běžně používaný termín pochází výhradně z vizuální podobnosti pastorků diferenciálu se šroubem, zejména na rozdíl od jeho hlavních ozubených kol. A satelitní ozubená kola se zde neotáčí na nápravách, ale ve válcových kapsách vyfrézovaných ve skříni diferenciálu / unašeči. Myšlenka blokování je založena na skutečnosti, že u spirálového ozubení při zatížení vznikají axiální síly, které mají tendenci tlačit obě ozubená kola podél jejich os v opačných směrech od kontaktní roviny, a zde je tato vlastnost primárně využívána u párů vzájemně propojených satelitů. , které k tomu dostávají určitou axiální pohyblivost. Při tahu, při otáčení nebo prokluzování kola, se rotující satelity zaklíněné ve svých kapsách opírají o konce skříně diferenciálu, díky čemuž jsou brzděny a samočinně vyrovnávají úhlové rychlosti hnaných ozubených kol. Zaklínění satelitů je tím silnější, čím vyšší je jimi přenášený točivý moment, ale samotný koeficient blokování je dán úhlem sklonu záběrových zubů a třecími vlastnostmi kontaktních párů satelit/pouzdro. Ke zvýšení samobrzdného účinku v těchto diferenciálech se obvykle používají tři páry satelitů více, než je minimum požadované pro plochý planetární mechanismus – konkrétně od čtyř do sedmi párů. A pro posílení třecího účinku v místech kontaktu konců satelitů s pouzdrem diferenciálu lze použít distanční kotouče vyrobené z materiálu, který vytváří zvýšenou odolnost proti tření. V případě jednotlivých satelitů je činnost diferenciálu v zásadě podobná, jen s tím rozdílem, že zde se na samobrzdění podílejí nejen satelity, ale i centrální ozubená kola diferenciálu.
Vzhledem k tomu, že spirálová kola mohou být použita na plochých planetových převodech libovolného schématu a tvaru, mohou být diferenciály na nich založené s téměř libovolnými danými převodovými poměry v každém páru master-slave článků. V souladu s tím mohou být takové diferenciály jak symetrické, tak asymetrické a mohou být použity v převodovce jako mezikolové i mezinápravové. Na těchto diferenciálech se aktivně využívá předpětí a blokovací moment zde vzniká v trakčním režimu i při absenci rozdílu úhlových rychlostí na výstupu. Ale výhradně na spirálovém ozubení nejsou k dispozici vysoké hodnoty součinitele svornosti (obvykle < 3) a pro zvýšení efektu lze takové diferenciály doplnit třecími pakety, jako jsou diferenciály s diskovým uzávěrem.
Šroubové diferenciály jsou dnes velmi běžné. Jejich hlavní oblastí použití jsou sportovní a závodní vozy. Používají se také jako tuning pro mírné zlepšení průchodnosti u silničních aut. Na skutečných terénních vozidlech se však obvykle nepoužívají. Nejznámější vzorky jsou od britské společnosti Quaife Engineering a americké Torsen NA Inc. . V prvním případě se diferenciál nazývá - Quaife . V druhém případě se jedná o tzv. Torsen Type-2 a Torsen Type-3 .
Konstrukčně jsou všechny šnekové diferenciály vyrobeny na základě jednoduchých prostorových planetových mechanismů schématu SVS se satelity na křížících se nápravách . Vizuálně zde záběrové dvojice Slunce-satelit vypadají jako šnekové soukolí , u kterého jsou osy šnekového kola a šneku samotného také navzájem kolmé a nekříží se. Satelity i hnaná ozubená kola mohou fungovat jako šnekové a šnekové kolo a existuje vývoj šnekového zámku s oběma možnostmi pro rozdělení rolí mezi ozubenými koly. Myšlenka blokování je založena na skutečnosti, že šnekové kolo se vyznačuje samobrzděním v případech, kdy je výkon směrován ze šnekového kola na šnek, který je tím silnější, čím větší je úhel sklonu zubů šneku. k jeho ose otáčení.
Ačkoli je šnekový diferenciál nejlépe známý ve variantě vyvinuté společností American Torsen NA Inc. , - tzv. Torsen Type-1 - samotná vývojářská společnost se při popisu svého diferenciálu z nějakého důvodu vyhýbá termínu "šneková převodovka". Ozubené soukolí je zde deklarováno jako spirálové na protínajících se osách, ale ne pouze spirálové, ale s určitým specifickým, vyvinutým samotným Torsenem a jimi patentovaným tvarem zubů Invex™ , což je vlastně soukromá verze evolventního ozubení . V ruskojazyčné technické literatuře se má za to, že u Torsen Type-1 hrají roli šneků poháněná ozubená kola a roli šnekových kol jsou satelity. Vysvětlení pro to vyplývá z odlišného úhlu sklonu spirálového řezu na hnaných ozubených kolech a satelitech. Neobvyklý třířadý tvar satelitu s čelním ozubením podél okrajů a spirálovým ozubením ve středu je vysvětlen pouze tím, že kvůli uspořádání s protínajícími se osami je konstrukčně nemožné uspořádat pomocí stejného ozubeného kola řezání současně záběr obou satelitů s hnanými ozubenými koly a satelitů mezi sebou a pro zvýšení vnitřního odporu diferenciálu je tato vlastnost irelevantní. Obě hnaná ozubená kola zde mají souměrné řezání zubů a určitou minimální axiální pohyblivost, která je stejně jako u šroubových diferenciálů nutná k řazení obou ozubených kol podél osy pod zatížením, pouze v tomto případě ne pro kontakt se pouzdro, ale pro jejich vzájemné samočinné brždění, což významně přispívá k celkovému zvýšení vnitřního odporu. Diferenciál citlivý na točivý moment. Blokovací koeficient v různých verzích je 3-6. Diferenciál je vzhledově i kinematicky symetrický a v případě mezinápravového diferenciálu byl použit na úpravách vozů AWD , původně s pohonem předních kol. Obecně je Torsen Type-1 jedním z nejznámějších modelů RPA. Byl široce používán v závodních vozech WRC a Formule 1 různých ročníků, a to jak jako mezikolo, tak jako mezinápravový. A na silničních autech se stala zcela jednoznačnou asociací se systémy pohonu všech kol od Audi - Quattro - i když Audi v posledním vývoji využilo jiné možnosti. Mezi terénními vozy je známým nosičem této RPA Hummer H1 .
Skutečné šnekové diferenciály s vysokými (řádově 10 a ještě vyššími) svornými poměry byly americké a německé konstrukce pro terénní nákladní vozy. V tomto případě konstrukce planetového mechanismu RPVS předpokládala trojité vzájemně propojené satelity, z nichž dva satelity byly červy a jeden byl šnekové kolo. Také hnaná ozubená kola byla šneková a celkem bylo v diferenciálu 8 šneků a 6 šnekových kol dvou velikostí. K hlavním pokusům o masové použití těchto RPA došlo v předválečných letech. V SSSR byl tento typ RPA testován po válce, a to jak ve formě trofejí od Rheinmetall-Borsig AG , tak v podobě domácího vývoje "vylepšeného" designu vycházejícího z německého. Pro konkrétní americké a německé dopravce nejsou k dispozici žádné údaje, ačkoli se předpokládá, že šnekové diferenciály byly běžné u různých terénních a těžařských nákladních vozidel a traktorů. V SSSR je jediným víceméně masovým nosičem Ural-375D . Moderní použití je pravděpodobně nulové.
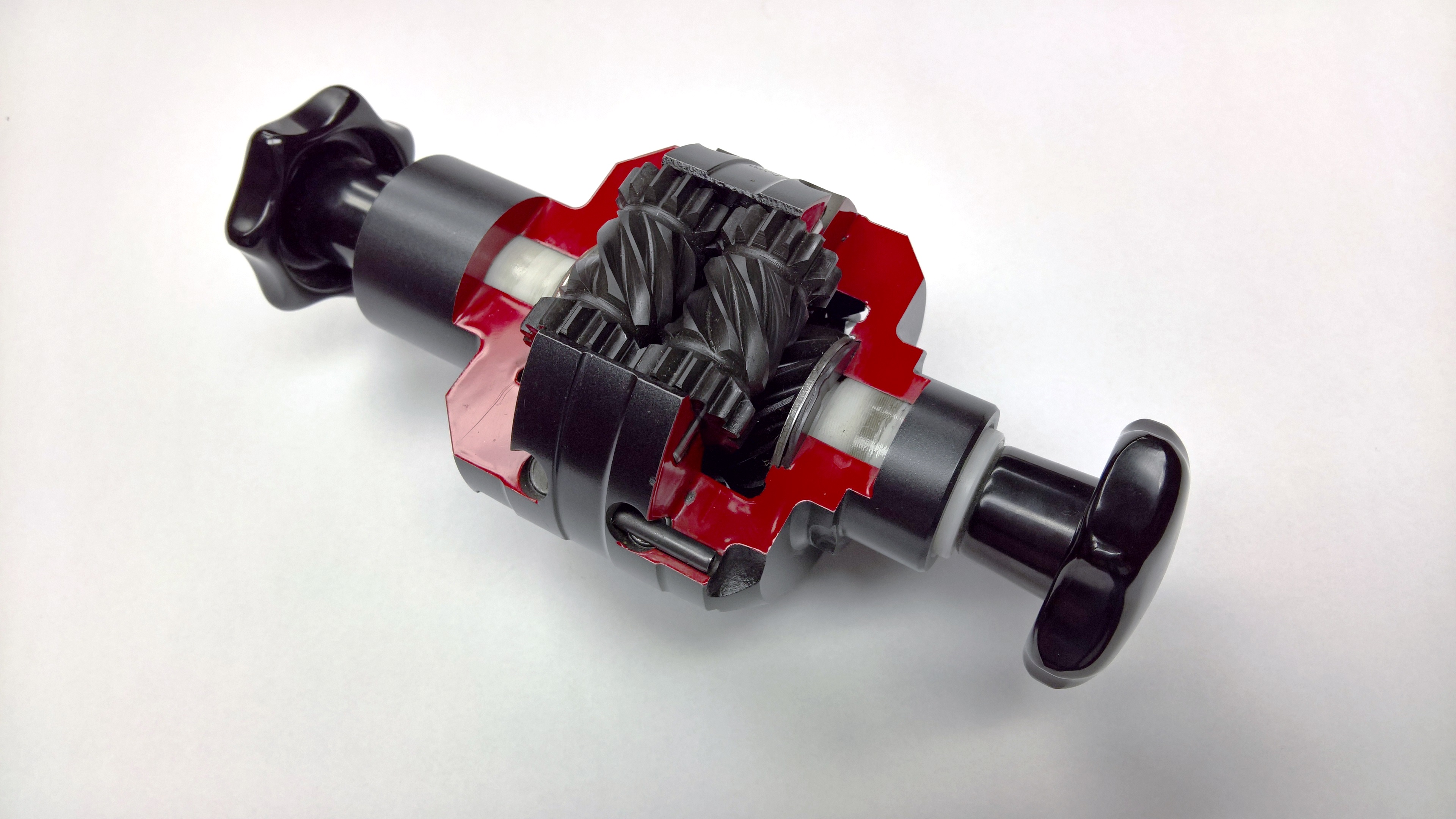
Konstrukčně je diskový diferenciál vždy tvořen planetovým mechanismem schématu SHS na kuželových soukolích, doplněný dvojicí miniaturních kuželových třecích spojek a dvojicí lamelových třecích paketů umístěných podél osy diferenciálu na obou stranách mezi hnaná ozubená kola a skříň. Některé z třecích kotoučů jsou zde v záběru se skříní diferenciálu a některé jsou v záběru s miniaturní kuželovitou spojkou, která je spojena se svým vlastním hnaným ozubeným kolem (slunce). Myšlenka blokování je založena na skutečnosti, že při zatížení vznikají v kuželových soukolích axiální síly, které mají tendenci tlačit ozubená kola od sebe, a na rozdíl od volného diferenciálu, kde se snaží tento efekt vyrovnat, je právě díky tomu jsou třecí pakety mezi hnanými ozubenými koly a skříní diferenciálu stlačeny, což zase vede k vyrovnání úhlových rychlostí. Kromě kuželových spojek a třecích paketů se zde často pro posílení účinku používá distanční pružina, instalovaná mezi hnaná kola. A aby se účinek zvýšil, tyto diferenciály obvykle nemají dva, ale čtyři satelity na křížovém nosiči.
Vývoj takových diferenciálů je znám již z předválečného období – zabývaly se jimi americké firmy LeTurno-Westinghouse a Borg Warner. Diferenciály získaly svůj moderní vzhled a uzávěr kotouče v 60. letech, kdy se objevily poměrně spolehlivé třecí materiály, které umožnily udělat celý systém kompaktní a vhodný pro automobily. Dnes se používají jako příčné nápravy v zadních hnacích nápravách sportovních i terénních vozidel. Spolehlivý, ale může časem vyžadovat úpravu.
Strukturálně existují dvě možnosti. V jednom případě je mezi oběma hnanými koly volného diferenciálu umístěna vačková spojka , skládající se ze dvou vačkových kotoučů a mezilehlého separátoru s prasklinami . Ve druhém případě planetové kolo diferenciálu vůbec nemá ozubená kola: oddělovací kroužek slouží jako náhradní nosič diferenciálu, satelity jsou crackery a roli hnaných ozubených kol plní dva vačkové kotouče nebo kroužky se zvlněným profilem povrchu splývajícím se separátorem. V obou případech je myšlenka blokování založena na skutečnosti, že s určitým rozdílem v úhlových rychlostech hnaných článků jsou crackery vklíněny mezi vačkové kotouče nebo kroužky a téměř okamžitě blokují diferenciál. Blokování zde funguje pouze na rozdílu úhlových rychlostí. Do určité hodnoty tohoto rozdílu pracuje diferenciál jako volný, při jeho dosažení se okamžitě zablokuje a je jedno, zda je zatížen točivým momentem nebo ne. Mezi volným a zablokovaným stavem neexistuje žádný přechodný režim částečného blokování.
První známý vývoj vačkových diferenciálů je pravděpodobně Ferdinandem Porsche . Právě jeho diferenciál šel do série na strojích KdF-Kübelwagen . Samosvorné vačkové diferenciály se dnes používají především jako mezikolové diferenciály v terénních vozidlech a ve vojenské technice (obrněné transportéry apod.).
Strukturálně jsou diferenciály s kulovým uzávěrem jakýmsi náhradním planetovým převodem symetrického schématu SHS . Formálně nemají ve své konstrukci ani ozubená kola ani satelity, ale ve skutečnosti jsou funkce jejich součástí a obecný princip jejich činnosti totožné s konstrukcí a principem činnosti jakéhokoli skutečného planetového diferenciálu a je určena blokovací mechanika. zvýšením vnitřního odporu vůči práci, jako u jiných typů samosvorných diferenciálů. V roli satelitů se zde uplatňují kuličky, které jsou pevně slisovány do smyčkových drážek v pouzdře (nosiče) diferenciálu a které se stejně jako skutečné satelity dotýkají současně navzájem i s dvojicí hnaných náhradních ozubených kol (dvě slunce). S malým rozdílem v úhlových rychlostech se kuličky, které se navzájem tlačí, pohybují ve smyčkové drážce v jednom nebo druhém směru, což zajišťuje různé otáčení celé konstrukce. Při dosažení určité úrovně rozdílu úhlových rychlostí (prokluzu) hnaných ozubených kol ji koule nedokážou udržet (rozdíl), vlivem tření se samočinně zabrzdí ve svých drážkách a tím vytvoří blokovací efekt.
Tento design je v celosvětovém automobilovém průmyslu málo známý a jeho distribuce je pravděpodobně omezena na Rusko a Ukrajinu. Nejznámější kulové diferenciály jsou automatický diferenciál Krasikov a automatický diferenciál Nesterov.
Konstrukčně se diferenciál skládá z jednoduchého planetového mechanismu absolutně libovolného obvodu a viskózní spojky spojující libovolné dva jeho články (libovolné dva napájecí/snímací hřídele). Viskózní spojka může být umístěna jak uvnitř diferenciálu a spojovat dva hnané články, nebo vně a spojovat hnací a hnaný článek (umístění viskózní spojky neovlivňuje zásadní činnost celého systému). Myšlenka blokování je založena na vlastnostech viskózní spojky pro vyrovnání úhlových rychlostí jejích dvou článků díky vlastnostem dilatantní tekutiny. Blokování je vyvoláno pouze rozdílem úhlových rychlostí. 100% blokování je povoleno na krátkou dobu. Aktivně se využívají i přechodové režimy.
Viskózní RPA jsou méně účinné než výše uvedené mechanické RPA, protože rozptylují energii. Zejména jakékoli trvalé zatížení, které ohřívá tekutinu uvnitř spojky, má za následek trvalou trvalou ztrátu "diferenčního efektu". [jeden]
Tato RPA by neměla být zaměňována s použitím viskózní spojky v takzvaných systémech pohonu všech kol na vyžádání .
U diferenciálů tohoto typu se tělo gerotorového čerpadla otáčí na jedné straně a na opačné straně se otáčí hřídel spojený s ozubeným kolem uvnitř čerpadla. Když je rozdíl ve frekvencích otáčení skříně a ozubeného kola, čerpadlo stlačuje pracovní tekutinu ve vnitřní dutině čerpadla. Tím je zajištěn přenos točivého momentu na kolo stroje, které má silnější záběr. Systémy založené na čerpadlech mají horní a dolní limity tlaku a vnitřní tlumení, aby se zabránilo hysterezi . Nejnovější systémy s gerotorovými čerpadly mají počítačově řízený výkon, který poskytuje větší mobilitu a eliminuje oscilace.
Vývoj elektronických systémů v automobilech umožnil ovládat blokování nápravových hřídelů pomocí elektronických řídicích jednotek (ECU). Tyto systémy nutně používají různé senzory.
Prvním krokem bylo použití snímačů protiblokovacího kola (ABS) k určení rozdílu v úhlové rychlosti prokluzujících kol a následné vynucení použití brzdového systému k individuálnímu zpomalení kola otáčejícího se příliš vysokou rychlostí – a, tím přerozdělte moment směrem k opačnému kolu prostřednictvím volného diferenciálu . Funkce samosvorného diferenciálu u takových vozidel je napodobena, samotný diferenciál zůstává klasicky volný, a proto je takové řešení poměrně levné, nezhoršuje parametry vozu a nevyžaduje speciální údržbu. Takové systémy byly souhrnně označovány jako " protiskluzové ". Ve skutečnosti jde o pokročilejší verzi systému ABS, která funguje nejen při brzdění, ale také při pohybu a akceleraci. Používá se také jako součást globálnějšího systému pro „stabilizaci“ karoserie vozu na silnici při smyku. Tyto systémy jsou však omezeny výkonem brzdové soustavy, náchylné k přehřívání při nepřetržitém provozu a následné ztrátě účinnosti. Na plnohodnotných terénních vozidlech se většinou nepoužívají.
Druhou etapou bylo zavedení elektronických řídicích systémů s třecími spojkami implementovanými na každé nápravové hřídeli. Takové spojky mohou být rozepnuté při jízdě přibližně stejnými úhlovými rychlostmi, nebo naopak sepnuté pro konstantní přenos točivého momentu podobně jako u FullTime 4WD, ale když elektronika určí situaci prokluzu, a také aby tomu zabránila, jsou potřebné spojky sníženy s vypočítanou silou, přenášející větší točivý moment na méně pohyblivou nápravu. Používá se např. v systémech Haldex-4, VTM-4. Lze je realizovat jak pomocí elektrických spojek, tak hydraulických, ke kterým slouží elektrické čerpadlo.
Třetím stupněm vývoje takových diferenciálů je tzv. „ aktivních diferenciálů “, kde se místo blokování přísunu točivého momentu využívá neustálé řízení rozdělení tahu mezi nápravové hřídele. V řadě implementací, jako je Honda SH-AWD, je zadní diferenciál implementován pouze funkčně, bez nejklasičtější diferenciální mechaniky a zcela spoléhá na elektronické řízení trakce a otáček zadních kol. V tomto případě je využit celý moment přenášený na tuto nápravu, bez brzdných ztrát, je pouze přerozdělován směrem k méně prokluzujícímu hřídeli nápravy. Současně je možné zvýšit ovladatelnost při zatáčení díky přenosu zvýšeného točivého momentu na vnější hřídel nápravy a dokonce i při zvýšení úhlové rychlosti větší než obvykle díky převodovce s dalším zvyšujícím se číslem. Pokud některý ze snímačů používaných u takových systémů selže, trakční pohon nápravy se zastaví nebo se sníží funkčnost. Systém se také může sám vypnout, například při přehřátí.
{kind=link}
{kind=link}
{kind=link}