Mars Pathfinder
Stabilní verze byla odhlášena 24. října 2022 . Existují neověřené změny v šablonách nebo .| Mars Pathfinder | |
|---|---|
| Mars Pathfinder a Rover Sojourner , když se složí do své startovací pozice. ( JPL , říjen 1996) | |
| Zákazník | NASA , JPL |
| Operátor | Jet Propulsion Laboratory a NASA |
| panel | Cape Canaveral LC17B |
| nosná raketa | Delta-2 7925 D240 |
| zahájení | 4. prosince 1996 06:58:00 UTC |
| ID COSPAR | 1996-068A |
| SCN | 24667 |
| Specifikace | |
| Hmotnost | 463 kg (stanice Mars: 264 kg, rover: 11,5 kg) |
| Zásoby energie | Mars stanice: 35W, rover: 13W |
| Orbitální prvky | |
| Přistání na nebeském tělese |
4. července 1997 16:57 UTC |
| Logo mise | |
|
http://www.jpl.nasa.gov/missions/past/marspathfinder.html ← BLÍZKO Švec Lunar Prospector → | |
| Mediální soubory na Wikimedia Commons | |
Mars Pathfinder ("Mars explorer" analogicky s průzkumníkem; ve zdrojích také Mars Pathfinder [1] [2] nebo Mars Pathfinder [3] ) je program NASA pro studium Marsu pomocí stacionární marťanské stanice a roveru Sojourner ( angl . Sojourner - "rezident"). Stanice byla později přejmenována na Carl Sagan Memorial Station . Sojourner se stal prvním roverem , který operoval mimo soustavu Země-Měsíc.
Hlavním cílem programu bylo vyvinout technická řešení, jako je schéma levného přistání; dalším cílem bylo provádět vědecký výzkum: získání snímků povrchu, studium složení hornin pomocí spektrometru [4] , studium atmosféry [5] .
Průběh letu
Mars Pathfinder o celkové hmotnosti 895 kg a rozměrech 1,5 × 2,65 m (včetně paliva a roveru Sojourner o rozměrech 65x48x30 cm a hmotnosti 11,5 kg [6] ) vypustila 4. prosince 1996 NASA pomocí raketa -nosič Delta 2 měsíc po startu Mars Global Surveyor . Přistání přístroje na povrchu Marsu se uskutečnilo 4. července 1997 v údolí Ares v oblasti planiny Chryse Planitia .
Sestupové vozidlo vstoupilo do atmosféry rychlostí více než 7,5 km/s [7] , přičemž tepelná izolační ochrana jej chránila před přehřátím při zpomalování v atmosféře. Čelní obrazovka zhasla rychlost na 400 m/s během dvou minut. Poté byl otevřen padák o průměru 12,7 m. Přibližně 8 sekund před dopadem na hladinu se zapnuly brzdové motory a nafoukly tlumicí válce. Zařízení dosáhlo povrchu Marsu rychlostí 25 m/s (90 km/h) a několikrát se od něj odrazilo, dokud se úplně nezastavilo.
Kvůli poruše na stanici NASA Long Distance Network nebylo možné rover ten den oddělit. Navíc byla objevena komunikační nestabilita mezi marťanskou stanicí a roverem, která byla odstraněna až do 17:00 následujícího dne [5] .
5. července opustil rover Sojourner marťanskou stanici a 6. července zahájil vědecké experimenty (zejména studium nejbližšího kamene). 6. července bylo také přenášeno kruhové panorama, pořízené kamerou marťanské stanice. V budoucnu rover studoval několik dalších kamenů a stanice měřila parametry větru, teplotu a pořizovala snímky.
27. září 1997 se uskutečnila poslední komunikační relace s marťanskou stanicí (signál neobsahující data bylo možné přijímat až do 7. října a pokusy o navázání spojení s ní probíhaly až do března 1998). 10. března 1998 byl program Mars Pathfinder prohlášen za dokončený. Marťanská stanice pracovala na povrchu planety 3 měsíce, tedy mnohem déle, než byl odhadovaný čas (podle plánu - od týdne do měsíce).
Podle výzkumníků k selhání došlo kvůli baterii, která selhala kvůli velkému počtu cyklů vybíjení / nabíjení. Baterie byla použita k ohřevu elektroniky stanice těsně nad očekávanou noční teplotu Marsu. Po selhání baterie vedly nízké teploty k selhání kritických systémů a nakonec ke ztrátě komunikace.
Popis kosmické lodi
Mars stanice
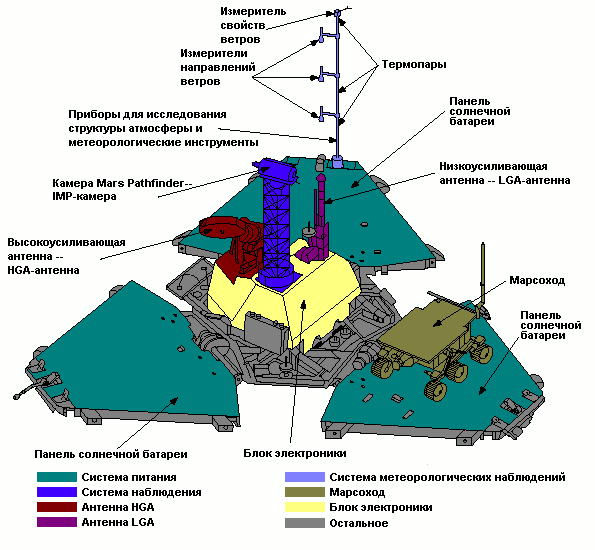
Marťanská stanice (viz obrázek ) je vybavena třemi solárními panely o celkové ploše 2,8 m², které za slunečného dne poskytují výkon 35 W. Kromě nich byla stanice vybavena i bateriemi.
{kind=link}
Marťanská stanice měla kameru (IMP) umístěnou na výsuvném stožáru o výšce až 1,8 m. Kamera je vybavena dvěma optickými vstupy (pro získání stereo obrazu) a filtry s 12 barevnými odstíny (expozice přes různé filtry po zkombinování umožňují získat barevné obrázky). Na stanici byl instalován meteorologický komplex ASI/MET se senzory pro měření rychlosti a směru větru, atmosférického tlaku a teploty a také magnety pro extrakci magnetických částic o velikosti až 0,1 mm ze země.
Marťanská stanice byla vybavena anténami s vysokým a nízkým ziskem (v některých dnech nebyl dostatek elektřiny pro provoz hlavní antény s vysokým ziskem a data byla přenášena přes anténu s nízkým ziskem rychlostí 40-150 bps; hlavní anténa umožňovala komunikaci při rychlostech nad 8 Kbps). Stanici řídil počítač RAD6000 s 32bitovým procesorem a 128 MB paměti. Na palubě byl použit operační systém VxWorks [8] .
Sojourner rover
Hmotnost roveru (viz schéma ) byla spolu s veškerým vybavením asi 15,5 kg, hmotnost při práci na povrchu Marsu byla 10,6 kg; rozměry - 0,65×0,48×0,3 m. Sojourner používá 11 stejnosměrných motorů RE016DC o výkonu 3,2 W od společnosti Maxon Motor . Šest motorů natáčí kola, jeden pro každé kolo, 4 nastavují směr jízdy a poslední zvedá a spouští spektrometr. Motory snesou teploty až -100 °C [9] .
{kind=link}
Rover byl vybaven šesti koly o průměru 13 cm, z nichž každé je schopno se samostatně otáčet. Zařízení je schopno naklonit se až o 45° bez převrácení a překonávat překážky vysoké až 20 cm.
Sojourner byl poháněn solárním polem s články arsenidu galia . Plocha baterie 0,2 m², výrobce Tecstar Inc. ". Baterie stačila na provoz zařízení několik hodin denně i při zatažené obloze. Kromě toho měl rover tři radioizotopové prvky s několika gramy plutonia-238 pro udržení požadované teploty v elektronické jednotce.
Rover udržoval kontakt se Zemí prostřednictvím marťanské stanice. Rover byl vybaven třemi kamerami – předním stereo systémem a zadní samostatnou kamerou. Zařízení mělo také spektrometr pro studium chemického složení hornin. Sojourner byl řízen 8bitovým procesorem Intel 80C85 běžícím na 100 kHz , velikost paměti RAM byla 512 kB a k dispozici byl také 176 kB pevný flash disk. Fungovalo bez operačního systému .
Vědecké výsledky
Po obdržení několika snímků oblohy v různých polohách hvězdy byli vědci schopni určit, že poloměr částic ve složení růžového oparu je asi 1 mikrometr. Soudě podle barvy je půda bohatá na hydroxid železitý, což podporuje teorii o teplém a vlhkém klimatu v minulosti. Pathfinder nesl na palubě řadu magnetů k měření magnetického obsahu marťanského prachu. Nakonec byly všechny magnety až na jeden pokryty prachem. Protože nejslabší magnet na sobě nesbíral žádné částice půdy, došlo k závěru, že polétavý prach neobsahuje čistý magnetit (magnetická železná ruda) ani oxymagnetity . Usazování prachu bylo pravděpodobně vyvoláno oxidem železa (Fe 2 O 3 ). Později pomocí jednodušších přístrojů rover Spirit zjistil, že pouze přítomnost magnetitu může vysvětlit magnetické vlastnosti prachu a půdy na Marsu.
Každodenní sledování Dopplerova posunu a méně časté měření vzdálenosti mezi kosmickou lodí a komunikačními stanicemi v hlubokém vesmíru během komunikačních relací umožnilo určit polohu marťanské stanice a směr marťanské osy rotace. Získaná data, s přihlédnutím k informacím získaným dříve vikingskými landery , umožnila trojnásobně zlepšit určení precesní konstanty Marsu. Určitý stupeň precese je v souladu s hypotézou, že nehydrostatická složka pólového momentu setrvačnosti je způsobena existencí rozlehlé sopečné vrchoviny Tharsis . Počítá se, že poloměr kovového jádra Marsu je od 1300 do 2000 km. [deset]
Celkem bylo přeneseno 16,5 tisíc snímků z kamery marťanské stanice a 550 snímků z kamer roveru, bylo provedeno 15 analýz hornin. Vědecké výsledky poskytují další podporu pro hypotézu, že Mars byl jednou více "vlhčí a teplejší".
Sojourner zkoumá kameny
Rover začal prozkoumávat první kámen na třetím solu . Kámen se jmenoval Barnacle Bill . _ _ Studium složení bylo prováděno pomocí alfa-protonového rentgenového spektrometru (APXS) po dobu 10 hodin. Byly nalezeny všechny prvky kromě vodíku , který tvoří méně než 0,1 % hmoty horniny nebo půdy. "Barnacle Bill" byl svým složením podobný pozemským andezitům , což potvrzuje velkou sopečnou aktivitu Marsu v minulosti.
Dalším předmětem zkoumání byl kámen, který dostal jméno „ jogín “. Kámen připomínal medvědí hlavu, proto byl pojmenován podle kreslené postavičky Medvěd Yogi. Analýza pomocí APXS ukázala, že kámen je kus čedičové skály, primitivnější v elementárním složení než Barnacle Bill. Tvar a textura povrchu Yogi naznačují, že byl unášen vodními proudy.
Poté vědce upoutalo jeho bělavé zbarvení na kámen Scubee-Doo a byl k němu vyslán rover, aby zkontroloval, zda je kámen pokryt sedimentární kůrou. Na Sol 18 byla úspěšně přijata měření Scooby-Doo a na Sol 21 byla dokončena analýza dat složení horniny. Ukázalo se, že je složením podobná půdě pěstební plochy, ale oproti dříve studovaným kamenům má zvýšený obsah vápníku a křemíku [11] .
Na dalším kameni, „Moe“, bylo na jeho povrchu nalezeno několik značek ukazujících větrnou erozi .
V oblasti zvané „Skalní zahrada“ narazil Sojourner na duny v podobě půlměsíce, podobné zemi.
Místa přistání kosmických lodí na Marsu

![]()
![]()
Poznámky
- ↑ První kroky . Cesta kolem světa (1. září 2001). Získáno 12. června 2017. Archivováno z originálu 15. června 2017.
- ↑ Mark T. Lemmon. Obklopen Marsem . NASA (18. září 2001). Získáno 12. června 2017. Archivováno z originálu 3. března 2018.
- ↑ Mars Pathfinder Space Laboratory . AstroNautica. Získáno 12. června 2017. Archivováno z originálu 23. června 2017.
- ↑ Mars rover Opportunity našel stopy sladké vody . Lenta.ru (10. června 2013). Získáno 12. června 2017. Archivováno z originálu 12. dubna 2021.
- ↑ 1 2 "Mars Pathfinder" zkoumá Mars // Cosmonautics News: Journal. - 1997. - č. 14.
- ↑ Přehled a cíle mise Roveru . Získáno 27. září 2021. Archivováno z originálu dne 27. září 2021.
- ↑ Mars Pathfinder – Vstup do sestupu a přistání . NASA . Archivováno z originálu 1. června 2012.
- ↑ CS 5523 Operating Systems - Mars Pathfinder (eng.) (nedostupný odkaz) . Laboratoř vizualizace a modelování UTSA. Získáno 7. května 2012. Archivováno z originálu 1. června 2012.
- ↑ Mars Pathfinder // Cosmonautics News: Journal. - 1997. - č. 18/19.
- ↑ Golombek, M. et. al. 1997. Přehled mise Mars Pathfinder a vyhodnocení předpovědí místa přistání. Věda. Věda: 278.pp. 1743-1748
- ↑ Práce na povrchu Marsu pokračují // Cosmonautics News: Journal. - 1997. - č. 15.
Odkazy
- Webová stránka NASA . Získáno 7. května 2012. Archivováno z originálu dne 18. května 2012.
- Mars Pathfinder Web NASA/JPL archivován 18. května 2012.
- Stereo páry „Twin Peaks“ s vysokým rozlišením
- Profil mise Mars Pathfinder (nedostupný odkaz) . Archivováno z originálu 29. září 2010. průzkumemsluneční soustavy NASA
- Stránka Mars Pathfinder Teda Stryka (nedostupný odkaz) . Archivováno z originálu 5. října 2007.
- "A Crawl On Mars" - Ted Stryk's Sojourner stránka roveru (downlink) . Archivováno z originálu 5. října 2007.
| | |
|---|---|
| V bibliografických katalozích |
| Průzkum Marsu kosmickou lodí | |
|---|---|
| Letící | |
| Orbitální | |
| Přistání | |
| rovery | |
| Marshalls | |
| Plánováno |
|
| Doporučeno |
|
| Neúspěšný | |
| Zrušeno |
|
| viz také | |
| Aktivní kosmické lodě jsou zvýrazněny tučně | |
| Discovery program _ | |
|---|---|
| Provozní |
|
| Budoucnost | |
| Dokončeno |
|
| Doporučeno |
|