Mars-3
Stabilní verze byla zkontrolována 17. srpna 2022 . Existují neověřené změny v šablonách nebo .| Mars-3 | |
|---|---|
| Výrobce | NPO je. Lavočkin |
| Operátor | vesmírný program SSSR |
| Úkoly | průzkum Marsu z oběžné dráhy a povrchu |
| Satelit | Mars |
| panel | Bajkonur |
| nosná raketa | Proton-K / Blok D |
| zahájení | 28. května 1971 18:26:30 MSK |
| Vstup na oběžnou dráhu | listopadu 1971 |
| Deorbit | 23. srpna 1972 |
| ID COSPAR | 1971-049A |
| SCN | 05252 |
| Specifikace | |
| Hmotnost | 4625 kg (orbitální stanice: 3625 kg, automatická stanice Mars: 355 kg) |
| Orbitální prvky | |
| Excentricita | 0,95548 |
| Nálada | 60° |
| Období oběhu | 12,79 dne |
| apocentrum | Najeto 211 400 km |
| pericentrum | 1500 km |
| Přistání na nebeském tělese |
2. prosince 1971 13:52 UTC |
| Přistávací souřadnice | 45° jižní šířky sh. 158°W / 45 ° S sh. 158°W d. / -45; -158 |
| Mediální soubory na Wikimedia Commons | |
„Mars-3“ je sovětská automatická meziplanetární stanice (AMS) čtvrté generace vesmírného programu Mars . Jeden ze tří AMC řady M-71. Stanice Mars-3 je určena k průzkumu Marsu jak z oběžné dráhy, tak přímo na povrchu planety. AMS se skládala z orbitální stanice - umělé družice Marsu a sestupového vozidla s automatickou marťanskou stanicí.
Světově první měkké přistání sestupového vozidla na Mars a jediné v sovětské kosmonautice [1] . Přenos dat z automatické marťanské stanice začal 1,5 minuty po přistání na povrchu Marsu, ale po 14,5 sekundách se zastavil.
Specifikace
- Hmotnost AMC při startu: 4625 kg [2]
- Hmotnost orbitální stanice při startu: 3625 kg
- Hmotnost sestupového vozidla při startu: 1000 kg
- Hmotnost sestupového vozidla při vstupu do atmosféry Marsu: žádné informace z autoritativních zdrojů
- Hmotnost automatické stanice Mars: 355 kg (po měkkém přistání na Marsu)
Konstrukce
AMS "Mars-3" byl vyvinut v NPO pojmenovaném po S. A. Lavočkinovi , sestával z orbitální stanice - umělé družice a sestupového vozidla s automatickou marťanskou stanicí [2] . Uspořádání AMS navrhl mladý konstruktér V. A. Asyushkin. Řídicí systém o hmotnosti 167 kg a spotřebě 800 wattů vyvinul a vyrobil Výzkumný ústav automatizace a měřicí techniky .
Základem orbitální stanice byl blok nádrží hlavního pohonného systému válcového tvaru. K tomuto bloku byly připojeny solární panely , vysoce směrová parabolická anténa, radiátory tepelného řídicího systému , sestupové vozidlo a přístrojový prostor . Přístrojový prostor byl toroidní utěsněný kontejner, který obsahoval palubní počítačový systém , navigační a orientační systémy a další systémy. Venku byly k přístrojovému prostoru připevněny astronavigační přístroje.
Meziplanetární stanice je vybavena autonomním vesmírným navigačním systémem, který nemá ve světě obdoby. Systém využíval optický goniometr. 7 hodin před příletem k Marsu mělo zařízení provést první měření úhlové polohy Marsu vůči základnímu souřadnicovému systému. Naměřená data byla přenášena do palubního počítače řídicího systému, který vypočítal třetí korekční vektor nutný k převedení stanice na nominální trajektorii. Na základě výsledků výpočtů vydal řídicí systém kosmické lodi příkazy k provedení korekce bez rušení Země. Prototypem řídicího systému byl počítačový systém lunární orbitální lodi, jehož jádrem byl palubní počítač S-530 založený na prvcích typu „ Tropa “ [ 3] .
Sestupovým vozidlem byla kuželovitá aerodynamická brzdová clona o průměru 3,2 metru a horním úhlem 120 stupňů, zakrývající automatickou marťanskou stanici (ve tvaru téměř kulového). Na vrcholu automatické marťanské stanice byl pomocí upínacích popruhů připevněn toroidní přístrojový padákový kontejner, který obsahoval výfukové a hlavní padáky a nástroje potřebné k zajištění stažení, stabilizace, sestupu z blízké marťanské dráhy, brzdění a měkkého přistání a spojovací rám. Na rámu je motor na tuhá paliva pro převedení sestupového vozidla z letové dráhy na přilétající a jednotky autonomního řídicího systému pro stabilizaci sestupového vozidla po jeho odstavení z orbitální stanice. Na palubě sestupového vozidla byla také upevněna vlajka s vyobrazením státního znaku SSSR . Před letem bylo sestupové vozidlo sterilizováno.
Automatická marťanská stanice zahrnovala rover PrOP-M .
Let
Stanice byla vypuštěna z kosmodromu Bajkonur pomocí nosné rakety Proton-K s přídavným 4. stupněm - horním stupněm D 28. května 1971 v 18:26:30 moskevského času . Na rozdíl od AMS předchozí generace byl Mars-3 nejprve vypuštěn na střední oběžnou dráhu umělé družice Země a poté přenesen na meziplanetární trajektorii pomocným blokem D.
Let na Mars trval více než 6 měsíců. 8. června a listopadu 1971 byly úspěšně provedeny korekce trajektorie. Až do okamžiku přiblížení k Marsu probíhal let podle programu. Přílet stanice k planetě se shodoval s velkou prachovou bouří . Prachová bouře začala 22. září 1971 ve světlé oblasti Noachis na jižní polokouli. Do 29. září pokryto dvě stě stupňů zeměpisné délky od Ausonie po Thaumasii. 30. září uzavřel jižní polární čepičku. Silná prachová bouře bránila vědeckým studiím povrchu Marsu z umělých satelitů " Mars-2 ", "Mars-3", " Mariner-9 ". Teprve 10. ledna 1972 prachová bouře ustala a Mars získal normální vzhled.
2. prosince 1971 byla provedena třetí korekce trajektorie. Korekce byla provedena pomocí palubní automatiky bez použití pozemních zařízení. Autonomní astro-orientační systém stanice zajistil její orientaci a určil polohu stanice vůči Marsu. Získaná data byla automaticky vložena do palubního elektronického počítače, který vypočítal velikost a směr korekčního impulsu a vydal potřebné příkazy pro korekci. Po třetí korekci stanice vstoupila na dráhu procházející ve vzdálenosti 1500 km od povrchu Marsu.
Přistávací modul Mars 3 uskutečnil jako první na světě měkké přistání na Marsu 2. prosince 1971. Přistání začalo po třetí korekci meziplanetární dráhy letu a oddělení sestupového prostředku od orbitální stanice. Před oddělením byla stanice Mars-3 orientována tak, aby se sestupové vozidlo po oddělení mohlo pohybovat požadovaným směrem. K oddělení došlo 2. prosince ve 12:14 moskevského času, kdy AMS přiletěla k planetě, než se orbitální stanice zpomalila a přesunula se na oběžnou dráhu družice Mars. Po 15 minutách byl aktivován motor na tuhá pohonná hmota sestupového vozidla, který přecházel z trajektorie průletu na trajektorii setkání s Marsem. Poté, co získal další rychlost rovnající se 120 m/s (432 km/h), sestupové vozidlo zamířilo k odhadovanému bodu vstupu do atmosféry. Řídicí systém namontovaný na příhradovém nosníku poté rozmístil sestupové vozidlo s kónickým brzdným štítem dopředu ve směru jízdy, aby zajistil správně orientovaný návrat do atmosféry planety. Pro udržení sestupového vozidla v této orientaci během letu k planetě byla provedena gyroskopická stabilizace. Otáčení zařízení podél podélné osy bylo prováděno pomocí dvou malých motorů na tuhá pohonná hmota instalovaných na obvodu brzdového síta. Od sestupového vozidla byl oddělen příhradový nosník s řídicím systémem a překládacím motorem, nyní již nepotřebným.
Let od oddělení k opětovnému vstupu trval asi 4,5 hodiny. Na příkaz ze zařízení program-time se zapnuly další dva motory na tuhá paliva, umístěné rovněž na okraji brzdové clony, načež se rotace sestupového vozidla zastavila. V 16:44 vstoupilo sestupové vozidlo do atmosféry pod úhlem blízkým vypočítanému, rychlostí asi 5,8 km/s a začalo aerodynamické brzdění. Na konci úseku aerodynamického brzdění, ještě při nadzvukové rychlosti letu, byl na povel čidla přetížení, pomocí práškového motoru umístěného na krytu výtažného prostoru, zaveden výtažný skluz. Po 1.5 byla pomocí prodloužené nálože přeříznuta komora torusového padáku a horní část komory (víko) byla odejmuta ze sestupového vozidla výtažným skluzem. Kryt zase představil hlavní padák s reefovanou kopulí. Šňůry hlavního padáku byly připevněny ke svazku motorů na tuhá paliva, které byly již připevněny přímo k sestupovému vozidlu.
Když zařízení zpomalilo na transsonickou rychlost, pak na signál ze zařízení časového programu došlo k reefingu - vrchlík hlavního padáku byl plně otevřen. Po 1–2 s byl aerodynamický kužel odhozen a antény rádiového výškoměru systému měkkého přistání se otevřely. Během několika minut sestupu na padáku se rychlost pohybu snížila na asi 60 m/s (216 km/h). Ve výšce 20-30 metrů byl na příkaz radiového výškoměru spuštěn brzdný motor měkkého přistání. Padák v této době odklonil na stranu jiný raketový motor, aby jeho kopule nezakrývala automatickou marťanskou stanici. Po nějaké době se motor pro měkké přistání vypnul a sestupové vozidlo, oddělené od padákového kontejneru, kleslo na hladinu. Zároveň byl pomocí motorů s nízkým tahem odkloněn na stranu padákový kontejner s motorem s měkkým přistáním. V době přistání chránil stanici před nárazovým zatížením hustý pěnový povlak. Přistání bylo provedeno mezi oblastmi Electris a Phaetontia. Souřadnice bodu přistání 45° jižní šířky. sh. 158°W / 45 / -45; -158° S sh. 158°W na plochém dně velkého kráteru Ptolemaios , západně od kráteru Reutov a mezi malými krátery Belev a Tyuratam [4] .
Měkké přistání na Marsu je složitý vědecký a technický problém. Během vývoje stanice Mars-3 byl reliéf povrchu Marsu špatně studován, o půdě bylo velmi málo informací. Navíc je atmosféra velmi řídká, jsou možné silné větry. Konstrukce aerodynamického kužele, padáků a motoru pro měkké přistání byly zvoleny s ohledem na provoz v širokém spektru možných podmínek sestupu a charakteristiku marťanské atmosféry a jejich hmotnost je minimální.
Do 1,5 minuty po přistání se automatická marťanská stanice připravila k práci a poté začala vysílat panorama okolního povrchu, ale po 14,5 sekundách vysílání přestalo. AMS vysílal pouze prvních 79 řádků fototelevizního signálu (pravý okraj panoramatu). Výsledným obrazem byly chaoticky uspořádané bílé, šedé a černé pruhy, na kterých nebylo možné odhalit jediný detail.
Následně se předpokládaly různé důvody náhlého ukončení signálu z povrchu: nebezpečná horizontální rychlost při přistání (Mars-3 vstoupil do atmosféry během planetární prachové bouře, kdy rychlost větru v blízkosti povrchu podle Mariner-9, byla více než 140 metrů za sekundu [5] ), koronový výboj v anténách vysílače v důsledku silné prachové bouře [6] , poškození baterie.
Orbitální stanice po oddělení sestupového vozidla provedla 2. prosince 1971 zpomalení a vstoupila na mimoprojektovou dráhu umělé družice Mars s oběžnou dobou 12 dní 16 hodin 3 minut (oběžnou dráhu s oběžnou dobou bylo plánováno 25 hodin). Neexistují žádné informace z autoritativních zdrojů o důvodech vstupu na mimoprojektovou orbitu. Následně se předpokládaly různé důvody: nedostatečně otestovaný software, proto se doba chodu motoru při brzdění ukázala kratší než vypočítaná, zvýšená spotřeba paliva při korekcích trajektorie způsobená abnormálním provozem nosné rakety.
23. srpna 1972 TASS oznámil dokončení letového programu. „Stanice provádí komplexní program průzkumu Marsu více než 8 měsíců. Během této doby provedla stanice 20 otáček kolem planety. AMS pokračovala ve výzkumu až do vyčerpání dusíku v orientačním a stabilizačním systému.
V roce 2002 vyšel v časopise Space Research článek, ve kterém bylo o práci Marsu-3 na blízké orbitě Marsu uvedeno: „Infračervená radiometrie, fotometrie, měření složení atmosféry, magnetického pole a plazmatu byly prováděny po dobu čtyř měsíců“ [7 ] .
Vývojáři fototelevizní instalace (FTU) použili špatný model Marsu, kvůli kterému byly zvoleny špatné expozice. Snímky se ukázaly přeexponované, téměř zcela nepoužitelné. Po několika sériích záběrů (každý po 12 snímcích) nebyla fototelevizní instalace použita [2] .
Zařízení pro hodnocení průchodnosti
PrOP-M je první rover na světě. Účel - měření hustoty půdy. V průběhu pěti let na zařízení pracovalo 150 lidí ve společnosti VNIITransmash v čele s designérem Alexandrem Leonovičem Kemurdžianem . Stejné vozítka PrOP-M byly součástí automatických marťanských stanic, které byly v roce 1971 dopraveny na povrch Marsu sestupovými vozidly sovětských meziplanetárních stanic Mars-2 a Mars-3. Přistávací modul Mars 2 havaroval při přistání. Přistávací modul Mars 3 provedl měkké přistání 2. prosince 1971, ale signál ze stanice Mars byl ztracen po 14,5 sekundách. Informace z roveru nebyly přijaty.
Hledání místa přistání
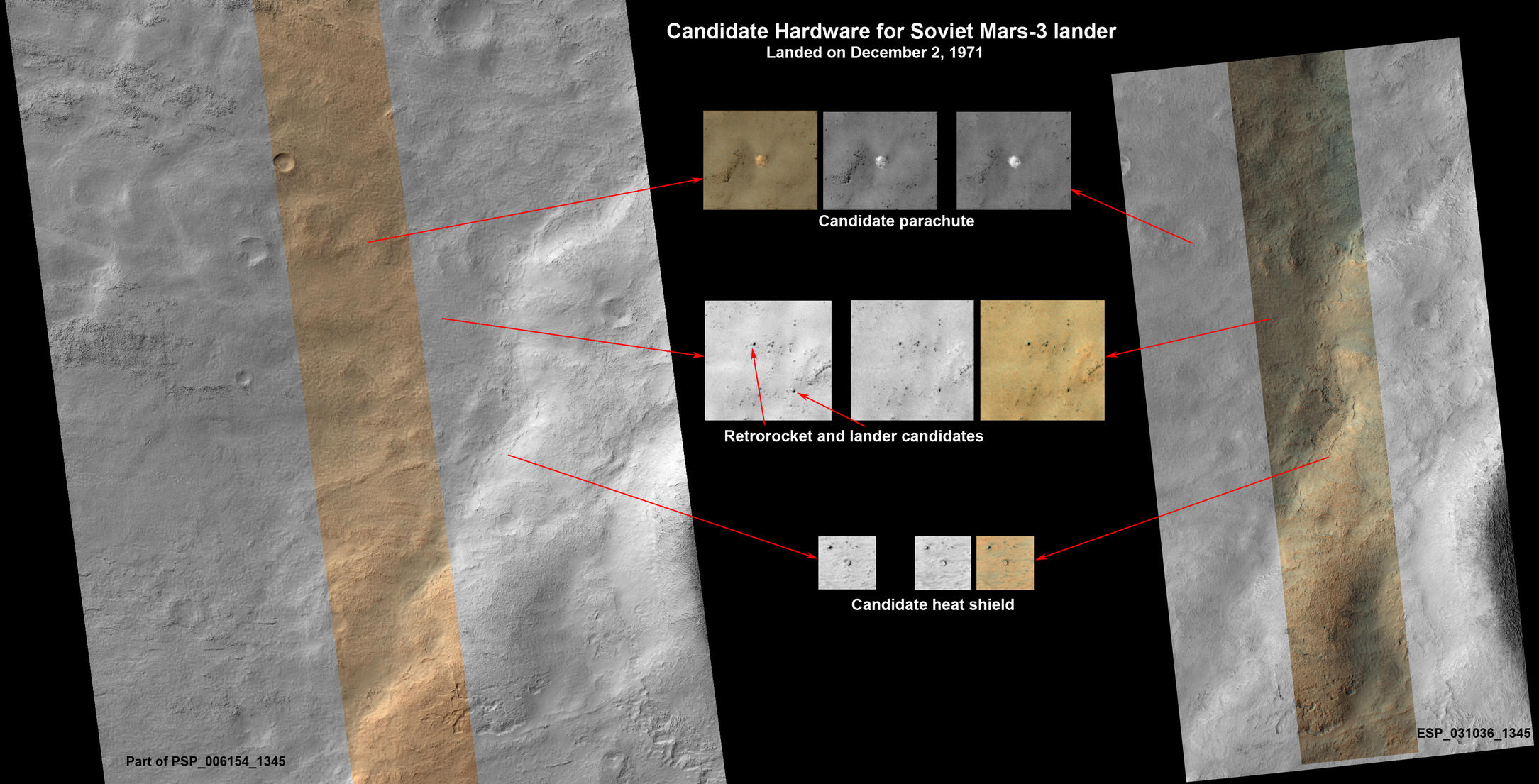
V rámci letového programu Mars Reconnaissance Orbiter byly učiněny pokusy najít místo přistání pro aparatura Mars-3 spolu s hledáním dalších marťanských automatických stanic, které lidstvo spustilo ve 20. století. Stanici se dlouho nedařilo najít v očekávaných souřadnicích přistání. V letech 2012-2013 vesmírní nadšenci vizuálně zkontrolovali a analyzovali snímky navrhované přistávací zóny stanice ve vysokém rozlišení, které byly pořízeny v roce 2007 satelitem Mars Reconnaissance Orbiter [8] . V důsledku toho byly identifikovány objekty, které jsou prvky sestupového vozidla Mars-3. Snímky identifikovaly automatickou stanici Mars, padák, motor s měkkým přistáním a aerodynamický štít. Při hledání jim pomáhali specialisté z NASA , GEOKHI , RKS , NPO jim. Lavočkin [1] [9] [10] [11]
Srovnání s AMS Mariner 9
- Tepelné záření půdy, kterým byla určována její struktura, bylo studováno nejen v infračerveném, ale (na rozdíl od Mariner-9) a v rádiovém rozsahu [12] .
- Globální fotometrické profily Marsu byly získány v mnoha spektrálních rozsazích. Mariner 9 taková měření neprováděl [12] .
- Byl stanoven obsah vody v atmosféře. Technika měření používala oblast spektra, kde dominuje odražené sluneční záření, spíše než tepelné záření, a intenzita pásma je téměř nezávislá na vertikální distribuci teplot. Taková technika je v zásadě dokonalejší než technika použitá na Mariner-9 [12] .
Místa přistání robotických stanic na Marsu

![]()
![]()
Viz také
- " Mars 1971C " je sovětská automatická meziplanetární stanice čtvrté generace ze série M-71, určená k průzkumu Marsu z umělé dráhy.
- " Mars-2 " je sovětský AMS čtvrté generace ze série M-71, určený k průzkumu Marsu jak z umělé dráhy, tak přímo na povrchu planety.
Poznámky
- ↑ 1 2 Pýcha sovětské kosmonautiky byla nalezena na Marsu . Získáno 26. června 2020. Archivováno z originálu dne 28. září 2016.
- ↑ 1 2 3 Mars -71 (Mars-2 a Mars-3) (nepřístupný odkaz) . webové stránky nevládní organizace Lavočkin. Získáno 17. února 2014. Archivováno z originálu 10. května 2013.
- ↑ Palubní počítač A. G. Glazkova Space Odyssey S-530 XXXVIII Akademická čtení o kosmonautice věnovaná památce akademika S. P. Koroljova a dalších vynikajících vědců - průkopníků vesmírného průzkumu 2014 str. 115 Archivováno 15. dubna 2015 na Wayback Machine .
- ↑ Názvy dvou ruských měst se objevily na mapě Marsu | RIA Novosti Archivováno 9. srpna 2013 na Wayback Machine .
- ↑ Carl Sagan. Kosmos: vývoj vesmíru, života a civilizace / Per. z angličtiny. A. G. Sergeeva. - Petrohrad. : Amphora, 2008. - 368 s. — (Knihovna nadace dynastie). — ISBN 978-5367008296 .
- ↑ Perminov, 2018 .
- ↑ V. I. Moroz, V. T. Huntress, I. L. Ševalev. Planetární expedice XX století // Výzkum vesmíru: časopis. - 2002. - T. 40 , č. 5 . - S. 451-481 . — ISSN 0023-4206 .
- ↑ Vitalij Jegorov. Jak jsme hledali Mars-3 . Habrahabr (11. 4. 2013). Získáno 11. dubna 2013. Archivováno z originálu 17. dubna 2013.
- ↑ Guy Webster. Snímky NASA Mars Orbiter mohou ukázat sovětský Lander z roku 1971 (anglicky) (odkaz není dostupný) . NASA (11. dubna 2013). Získáno 11. dubna 2013. Archivováno z originálu 17. dubna 2013.
- ↑ Snímky sondy NASA Mars Orbiter mohou ukázat sovětský Lander z roku 1971 . Staženo 2. ledna 2020. Archivováno z originálu 17. dubna 2019.
- ↑ 1 2 Webster, Guy Snímky NASA Mars Orbiter mohou ukázat sovětský Lander z roku 1971 . NASA (11. dubna 2013). Získáno 12. dubna 2013. Archivováno z originálu 29. června 2017.
- ↑ 1 2 3 Novinky o Marsu. — M .: Mir, 1974.
{kind=link}
{kind=link}
Literatura
- V. Smirnov. Signál z Marsu. Zpráva z Centra pro komunikaci v hlubokém vesmíru . Pravda (8. prosince 1971). Staženo: 12. prosince 2016.
- V. Moroz, L. Xanfomality. Čtyři měsíce na oběžné dráze Marsu // Bulletin Akademie věd SSSR: časopis. - 1972. - S. 10-25 .
- Novinka o Marsu. — M .: Mir, 1974.
- Bronshten V. A. Planeta Mars. — M .: Nauka, 1977.
- VG Perminov. Obtížná cesta na Mars : Stručná historie průzkumu Marsu v Sovětském svazu: [ eng. ] . - Franklin Classics Trade Press, 2018. - 86 s. — ISBN 0353299626 . — ISBN 978-0353299627 .
- Marov M.Ya, Huntress W.T. Sovětští roboti ve sluneční soustavě: technologie a objevy: [ rus. ] . - M. : Fizmatlit, 2017. - 611 s. — ISBN 978-5-9221-1741-8 .
Odkazy
- Sovětský útok na Mars (1971 - "Mars-2" a "Mars-3"). na YouTube
- AMC řady M-71 na webových stránkách NPO nich. Lavočkin
- Mars 3 na stránkách NASA
- Neoficiální flashový film o letu Mars-3
- Stručný popis konstrukce a letu Mars-2, Mars-3
- Popis konstrukce a letu Mars-2, Mars-3
- [bse.sci-lib.com/particle015942.html Obrázek Mars-3 ve Velké sovětské encyklopedii]
- Mohla by to být sovětská přistávací sonda Mars 3?
- Nalezen "Mars-3"?!, Hledání sovětských přistávacích modulů na Marsu
| Průzkum Marsu kosmickou lodí | |
|---|---|
| Letící | |
| Orbitální | |
| Přistání | |
| rovery | |
| Marshalls | |
| Plánováno |
|
| Doporučeno |
|
| Neúspěšný | |
| Zrušeno |
|
| viz také | |
| Aktivní kosmické lodě jsou zvýrazněny tučně | |
| |
|---|---|
|
| |
| Vozidla vypuštěná jednou raketou jsou oddělena čárkou ( , ), starty jsou odděleny interpunkcí ( · ). Lety s posádkou jsou zvýrazněny tučně. Neúspěšné spuštění je označeno kurzívou. | |